Proyecto Copiadora autónoma de memorias I2C (En Francés)
Publicado: 16 Feb 2016, 15:26
Copieur autonome de mémoires I2C
Proyecto Copiadora autónoma de memorias I2C (En Francés)
Description :
Sur ce site, sont proposés deux programmateurs pour les mémoires I2C de la série 24Cxx, l'un se connectant sur le port série, l'autre prévu pour le port parallèle. Ces deux dispositifs nécessitent d'avoir sous la main un PC, ce qui n'est pas toujours le cas, par exemple dans un atelier de dépannage TV (ou autres) ; dans ce cas de figure, la fonction recherchée consiste plutôt à pouvoir dupliquer le contenu d'une eeprom référence dans une mémoire vierge en vue d'un échange standard ; il suffira alors de se constituer une petite 'bibliothèque' de mémoires servant de modèles, et adaptées aux différents cas de figures rencontrés. Le montage présenté sur cette page permet d'effectuer cette duplication de manière totalement autonome, c'est-à-dire sans PC et avec une alimentation constituée d'une simple pile 9V. Il est conçu pour les 24C01, 24C02, 24C04, 24C08 et 24C16 (ou toute référence compatible, telle que la 24C164, etc.). Les mémoires I2C étendues (24C32 à 512) ne sont pour l'instant pas prises en charge.
se du schéma :
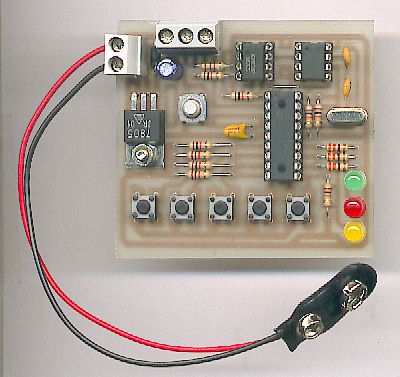
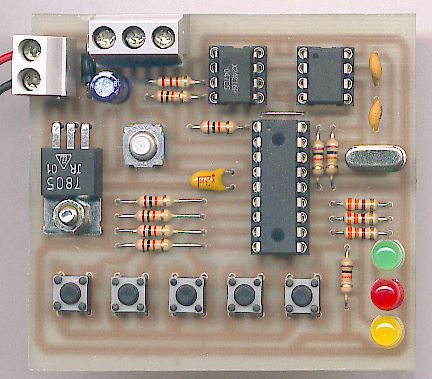
Comme vous pouvez le constater, l'ensemble est d'une grande simplicité ; le coeur du système est le microcontrôleur PIC16F84 bien connu, largement disponible à un prix raisonnable, et programmable avec des moyens 'rustiques' ; le recours à ce type de composant programmable s'impose comme une évidence compte tenu de la (relative) complexité du protocole I2C utilisé par les EEPROMs 24Cxx.
La pile 9V, associée à un classique régulateur 7805, fournit le +5v nécessaire aux alimentations du PIC et des mémoires ; la diode protège des inversions de polarité ; le PIC est, comme presque toujours, accompagné de son circuit d'horloge (quartz 4 MHz et condensateurs 15 pF), et de RESET (touche + 22k + 2,2µF, ces valeurs étant peu critiques). On trouve également trois leds (rouge, verte et jaune) indiquant l'état des opérations, ainsi que cinq touches pour lancer le cycle tout en indiquant au montage le modèle de mémoires présentes. Les résistances de 330 ohms limitent le courant dans les leds à un peu moins d'une dizaine de mA. Les résistances de 10 k ohms sont des résistances de tirage, servant à assurer un niveau logique "1" lorsque la touche sur l'entrée considérée est relachée (ou l'inter non passant, dans le cas de RA3). Bas de page (retour)
Les mémoires I2C partagent une ligne SDA commune, qui est la broche RA4 : cette sortie est du type "à collecteur ouvert", ce qui convient bien à la structure du bus I2C, contrairement aux autres sorties du PIC (RB0 à RB7 et RA0 à RA3) qui sont des sorties TTL. La résistance de tirage sur RA4 est donc absolument indispensable, contrairement à celles présentes sur RA0 et RA2 commandant les entrées SCL des mémoires ; je les ai mises afin de fixer les états des broches SCL lors du RESET, les sorties du PIC étant alors en haute impédance.
Je ne reprendrai pas ici la description du bus I2C et des échanges avec les mémoires 24Cxx : le visiteur intéressé se reportera à la rubrique "Protocole I2C" du programmateur I2C pour port parallèle, présenté sur ce même site.
Circuit imprimé
Ceux d'entre-vous qui possèdent le logiciel ARES Lite (ou même la version de démo disponible sur le web ?) pourront directement charger le fichier "COP-Ares.LYT" fourni et l'imprimer sur papier à l'échelle 1. Pour les autres, pas de problème : le dessin du circuit est également fourni ci-dessus au format GIF, avec une résolution de 600 DPI ; vous pourrez donc l'imprimer, par exemple avec Paint Shop Pro V3.11, en indiquant les dimensions : 7,20 cm x 5,93 cm (ou 2,83 pouces x 2,33 pouces). Avec les marges, une plaque de 6 cm x 7 cm suffit.
Il reste alors à réaliser une photocopie de bonne qualité (laser) sur un transparent. Une alternative consiste à rendre la feuille de papier transparente aux UV en vaporisant un produit comme le "Diaphane", de KF : j'ai utilisé cette méthode avec satisfaction, mais il est préférable de prolonger un peu l'insolation aux UV (dans mon cas, 5 mn au lieu de 3). Pour terminer, gravez, puis percez, selon votre méthode habituelle.
Liste des composants : Bas de page (retour)
3 résistances de 330 ohms.
9 résistances de 10 k ohms.
1 résistance de 22 k ohms.
2 condensateurs de 15 pF (céramique).
1 condensateur de 2,2 µF (tantale).
1 condensateur de 10 µF (électrolytique, radial).
1 diode 1N4001.
2 supports 'tulipe' 8 broches (2 x 4).
1 support 'tulipe' 18 broches (2 x 9).
1 quartz 4 MHz.
1 PIC 16F84 (ou 16F84A, ou 16C84).
1 régulateur 7805.
6 touches (voir description).
1 led rouge, diamètre 5 mm.
1 led verte, diamètre 5 mm.
1 led jaune, diamètre 5 mm.
1 double bornier à vis
1 triple bornier à vis
1 clip pour pile 9v.
1 pile 9v.
divers : soudure, époxy, perchlo, mèches, etc.
en option :
- 2 inters à bascule (pile et Mode),
- un bouton poussoir (RESET externe).
Remarques :
Utilisez impérativement des supports 'tulipe', en particulier pour les mémoires I2C, car ils seront appelés à supporter de nombreux retraits et insertions.
Un mot concernant les touches : ce modèle de touche (carrée, de 6 mm de côté) est assez courant, on le trouve dans les souris d'ordinateurs, en façade de magnétoscopes, lecteurs de CD et autres appareils audio ou vidéo en tous genres :

Comme le montrent le schéma et les photos ci-dessus, les touches possèdent quatre connexions, mais qui sont en fait reliées deux à deux de manière interne : ce sont les extrémités de deux bandes parallèles (bandes mises en contact lors de l'appui sur la touche) ; dans le doute, contrôlez le contact à l'ohmmètre. Cette structure permet de réaliser facilement des claviers matricés, sans avoir à ajouter de strap pour faire se croiser les lignes et les colonnes. Vous pouvez choisir un modèle de touche différent pour la touche RESET, ou vous abstenir de la câbler si vous préférez utiliser un bouton poussoir externe (relié au bornier triple).
Implantation des composants :
Câblage :
Commencez par souder les résistances et le strap (constitué d'une patte de résistance), puis la diode, puis les six touches, puis les trois supports de CI, les condensateurs 'céramique', chimiques, les leds, le quartz, et enfin les borniers. Connectez le clip de pile 9v au bornier double, avec éventuellement un interrupteur en série.
Si vous n'utilisez ni le poussoir RESET externe, ni l'interrupteur "Mode" (voir Mise en service), il n'est pas vraiment nécessaire de souder le bornier triple.
Comme vous le constatez sur la photo ci-dessus, il reste un peu de place sous les touches pour coller des étiquettes indiquant le type de mémoire auquel est associée chaque touche ; de gauche à droite : 24C01, 24C02, 24C04, 24C08 et 24C16. La touche RESET (blanche, à côté du régulateur) permet de se remettre en attente d'un cycle de programmation.
Programmation du PIC :
Personnellement, j'utilise le programmateur JDM ; sa structure est simple, et il tire son alimentation directement du port série auquel il est connecté.
Le programme :
Vous pouvez indifféremment utiliser un PIC16C84, un PIC16F84, ou un PIC16F84A, à condition de l'indiquer à PicCheap. Voici le fichier Cop10.HEX (version 1.0) à programmer dans le PIC. Exceptionnellement, j'ai décidé de fournir le fichier 'source' du programme si vous souhaitez y apporter des modifications ; téléchargez pour cela l'archive ASM-PIC.ZIP (80 ko) ; elle contient les quatre fichiers suivants :
COP10.ASM : le fichier source, éventuellement à éditer.
MPASM.EXE : l'assembleur fourni gracieusement par Microchip.
P16F84.INC : le fichier inclus contenant les définitions des registres du PIC16F84.
ASM.BAT : le fichier à lancer, qui appelle l'assembleur avec les bonnes options.
Lorsque vous lancez le fichier ASM.BAT, l'assemblage se produit, et génère quatre nouveaux fichiers :
COP10.COD, qui n'a pas d'intérêt pour nous.
COP10.ERR : la liste des erreurs rencontrées à la compilation ; il est vide (0 octet) si tout s'est bien déroulé.
COP10.HEX : le fichier au format Intel / Hexa contenant les codes 'machine' à charger dans le PIC grâce à PicCheap.
COP10.LST : le listing contenant toutes les informations obtenues à la compilation (programme source, codes 'machine', messages et nombre d'erreurs, etc.).
Mise en service :
Utilisation :
La pile est branchée, les mémoires ayant été insérées sur les supports 8 broches (l'original du côté du bornier triple, et la mémoire vierge du côté du quartz).
À la mise sous tension, les deux leds rouge et verte clignotent alternativement, pour indiquer que le montage est prêt à effectuer une copie.
Appuyez sur la touche correspondant au type de mémoires présentes :
[24C01], [24C02], [24C04], [24C08] ou [24C16]
Le cycle est lancé : les leds rouge et verte s'éteignent ; la led jaune se met à clignoter.
Si tout se passe normalement, la led jaune va clignoter :
1 fois dans le cas d'une 24C01.
2 fois dans le cas d'une 24C02.
4 fois dans le cas d'une 24C04.
8 fois dans le cas d'une 24C08.
16 fois dans le cas d'une 24C16.
Puis la programmation s'achève et la led verte s'allume pour indiquer que tout est terminé, et qu'aucune erreur n'a été détectée (leds jaune et rouge éteintes).
Si un problème survient (mémoire absente, erreur d'écriture...), la programmation s'interrompt aussitôt, et la led rouge s'allume (leds jaune et verte éteintes).
Lorsque tout est terminé, que la programmation ait réussi ou non, il suffit d'appuyer sur la touche RESET (Remise à zéro) pour repasser en mode 'Attente' (clignotement rouge / vert) ; on peut alors lancer une autre programmation en appuyant sur l'une des cinq touches.
L'appui sur la touche RESET en cours de programmation abrège l'opération. La copie n'est alors que partielle, il faudra par conséquent relancer la duplication.
Bas de page (retour)
La programmation dure environ :
1 seconde dans le cas d'une 24C01,
2 secondes dans le cas d'une 24C02,
4 secondes dans le cas d'une 24C04,
8 secondes dans le cas d'une 24C08,
16 secondes dans le cas d'une 24C16.
Cette durée peut paraître longue, notamment à ceux qui utilisent le programmateur pour PC (sur port série ou parallèle) dont l'action est presque instantanée, mais l'algorithme a été renforcé de manière à détecter pour ainsi dire à coup sûr (presque) toute erreur ; la fiabilité est à ce prix...
L'interrupteur 'Mode', lorsqu'il est passant, permet d'éviter une phase de vérification et de réduire ainsi la durée de la programmation d'environ un tiers (ainsi, pour une 24C16, elle passe à environ 11 secondes). Mais il est dommage de limiter de la sorte la fiabilité du système, et je n'exclus pas d'attribuer à l'interrupteur une autre fonction, dans une version ultérieure du système.
cop10.hex
cop10.asm
P16F84.INC
Compile con MPASM.EXE:
ASM.bat
Adjuntos
Proyecto Copiadora autónoma de memorias I2C (En Francés)
Description :
Sur ce site, sont proposés deux programmateurs pour les mémoires I2C de la série 24Cxx, l'un se connectant sur le port série, l'autre prévu pour le port parallèle. Ces deux dispositifs nécessitent d'avoir sous la main un PC, ce qui n'est pas toujours le cas, par exemple dans un atelier de dépannage TV (ou autres) ; dans ce cas de figure, la fonction recherchée consiste plutôt à pouvoir dupliquer le contenu d'une eeprom référence dans une mémoire vierge en vue d'un échange standard ; il suffira alors de se constituer une petite 'bibliothèque' de mémoires servant de modèles, et adaptées aux différents cas de figures rencontrés. Le montage présenté sur cette page permet d'effectuer cette duplication de manière totalement autonome, c'est-à-dire sans PC et avec une alimentation constituée d'une simple pile 9V. Il est conçu pour les 24C01, 24C02, 24C04, 24C08 et 24C16 (ou toute référence compatible, telle que la 24C164, etc.). Les mémoires I2C étendues (24C32 à 512) ne sont pour l'instant pas prises en charge.
se du schéma :
Comme vous pouvez le constater, l'ensemble est d'une grande simplicité ; le coeur du système est le microcontrôleur PIC16F84 bien connu, largement disponible à un prix raisonnable, et programmable avec des moyens 'rustiques' ; le recours à ce type de composant programmable s'impose comme une évidence compte tenu de la (relative) complexité du protocole I2C utilisé par les EEPROMs 24Cxx.
La pile 9V, associée à un classique régulateur 7805, fournit le +5v nécessaire aux alimentations du PIC et des mémoires ; la diode protège des inversions de polarité ; le PIC est, comme presque toujours, accompagné de son circuit d'horloge (quartz 4 MHz et condensateurs 15 pF), et de RESET (touche + 22k + 2,2µF, ces valeurs étant peu critiques). On trouve également trois leds (rouge, verte et jaune) indiquant l'état des opérations, ainsi que cinq touches pour lancer le cycle tout en indiquant au montage le modèle de mémoires présentes. Les résistances de 330 ohms limitent le courant dans les leds à un peu moins d'une dizaine de mA. Les résistances de 10 k ohms sont des résistances de tirage, servant à assurer un niveau logique "1" lorsque la touche sur l'entrée considérée est relachée (ou l'inter non passant, dans le cas de RA3). Bas de page (retour)
Les mémoires I2C partagent une ligne SDA commune, qui est la broche RA4 : cette sortie est du type "à collecteur ouvert", ce qui convient bien à la structure du bus I2C, contrairement aux autres sorties du PIC (RB0 à RB7 et RA0 à RA3) qui sont des sorties TTL. La résistance de tirage sur RA4 est donc absolument indispensable, contrairement à celles présentes sur RA0 et RA2 commandant les entrées SCL des mémoires ; je les ai mises afin de fixer les états des broches SCL lors du RESET, les sorties du PIC étant alors en haute impédance.
Je ne reprendrai pas ici la description du bus I2C et des échanges avec les mémoires 24Cxx : le visiteur intéressé se reportera à la rubrique "Protocole I2C" du programmateur I2C pour port parallèle, présenté sur ce même site.
Circuit imprimé
Ceux d'entre-vous qui possèdent le logiciel ARES Lite (ou même la version de démo disponible sur le web ?) pourront directement charger le fichier "COP-Ares.LYT" fourni et l'imprimer sur papier à l'échelle 1. Pour les autres, pas de problème : le dessin du circuit est également fourni ci-dessus au format GIF, avec une résolution de 600 DPI ; vous pourrez donc l'imprimer, par exemple avec Paint Shop Pro V3.11, en indiquant les dimensions : 7,20 cm x 5,93 cm (ou 2,83 pouces x 2,33 pouces). Avec les marges, une plaque de 6 cm x 7 cm suffit.
Il reste alors à réaliser une photocopie de bonne qualité (laser) sur un transparent. Une alternative consiste à rendre la feuille de papier transparente aux UV en vaporisant un produit comme le "Diaphane", de KF : j'ai utilisé cette méthode avec satisfaction, mais il est préférable de prolonger un peu l'insolation aux UV (dans mon cas, 5 mn au lieu de 3). Pour terminer, gravez, puis percez, selon votre méthode habituelle.
Liste des composants : Bas de page (retour)
3 résistances de 330 ohms.
9 résistances de 10 k ohms.
1 résistance de 22 k ohms.
2 condensateurs de 15 pF (céramique).
1 condensateur de 2,2 µF (tantale).
1 condensateur de 10 µF (électrolytique, radial).
1 diode 1N4001.
2 supports 'tulipe' 8 broches (2 x 4).
1 support 'tulipe' 18 broches (2 x 9).
1 quartz 4 MHz.
1 PIC 16F84 (ou 16F84A, ou 16C84).
1 régulateur 7805.
6 touches (voir description).
1 led rouge, diamètre 5 mm.
1 led verte, diamètre 5 mm.
1 led jaune, diamètre 5 mm.
1 double bornier à vis
1 triple bornier à vis
1 clip pour pile 9v.
1 pile 9v.
divers : soudure, époxy, perchlo, mèches, etc.
en option :
- 2 inters à bascule (pile et Mode),
- un bouton poussoir (RESET externe).
Remarques :
Utilisez impérativement des supports 'tulipe', en particulier pour les mémoires I2C, car ils seront appelés à supporter de nombreux retraits et insertions.
Un mot concernant les touches : ce modèle de touche (carrée, de 6 mm de côté) est assez courant, on le trouve dans les souris d'ordinateurs, en façade de magnétoscopes, lecteurs de CD et autres appareils audio ou vidéo en tous genres :
Comme le montrent le schéma et les photos ci-dessus, les touches possèdent quatre connexions, mais qui sont en fait reliées deux à deux de manière interne : ce sont les extrémités de deux bandes parallèles (bandes mises en contact lors de l'appui sur la touche) ; dans le doute, contrôlez le contact à l'ohmmètre. Cette structure permet de réaliser facilement des claviers matricés, sans avoir à ajouter de strap pour faire se croiser les lignes et les colonnes. Vous pouvez choisir un modèle de touche différent pour la touche RESET, ou vous abstenir de la câbler si vous préférez utiliser un bouton poussoir externe (relié au bornier triple).
Implantation des composants :
Câblage :
Commencez par souder les résistances et le strap (constitué d'une patte de résistance), puis la diode, puis les six touches, puis les trois supports de CI, les condensateurs 'céramique', chimiques, les leds, le quartz, et enfin les borniers. Connectez le clip de pile 9v au bornier double, avec éventuellement un interrupteur en série.
Si vous n'utilisez ni le poussoir RESET externe, ni l'interrupteur "Mode" (voir Mise en service), il n'est pas vraiment nécessaire de souder le bornier triple.
Comme vous le constatez sur la photo ci-dessus, il reste un peu de place sous les touches pour coller des étiquettes indiquant le type de mémoire auquel est associée chaque touche ; de gauche à droite : 24C01, 24C02, 24C04, 24C08 et 24C16. La touche RESET (blanche, à côté du régulateur) permet de se remettre en attente d'un cycle de programmation.
Programmation du PIC :
Personnellement, j'utilise le programmateur JDM ; sa structure est simple, et il tire son alimentation directement du port série auquel il est connecté.
Le programme :
Vous pouvez indifféremment utiliser un PIC16C84, un PIC16F84, ou un PIC16F84A, à condition de l'indiquer à PicCheap. Voici le fichier Cop10.HEX (version 1.0) à programmer dans le PIC. Exceptionnellement, j'ai décidé de fournir le fichier 'source' du programme si vous souhaitez y apporter des modifications ; téléchargez pour cela l'archive ASM-PIC.ZIP (80 ko) ; elle contient les quatre fichiers suivants :
COP10.ASM : le fichier source, éventuellement à éditer.
MPASM.EXE : l'assembleur fourni gracieusement par Microchip.
P16F84.INC : le fichier inclus contenant les définitions des registres du PIC16F84.
ASM.BAT : le fichier à lancer, qui appelle l'assembleur avec les bonnes options.
Lorsque vous lancez le fichier ASM.BAT, l'assemblage se produit, et génère quatre nouveaux fichiers :
COP10.COD, qui n'a pas d'intérêt pour nous.
COP10.ERR : la liste des erreurs rencontrées à la compilation ; il est vide (0 octet) si tout s'est bien déroulé.
COP10.HEX : le fichier au format Intel / Hexa contenant les codes 'machine' à charger dans le PIC grâce à PicCheap.
COP10.LST : le listing contenant toutes les informations obtenues à la compilation (programme source, codes 'machine', messages et nombre d'erreurs, etc.).
Mise en service :
Utilisation :
La pile est branchée, les mémoires ayant été insérées sur les supports 8 broches (l'original du côté du bornier triple, et la mémoire vierge du côté du quartz).
À la mise sous tension, les deux leds rouge et verte clignotent alternativement, pour indiquer que le montage est prêt à effectuer une copie.
Appuyez sur la touche correspondant au type de mémoires présentes :
[24C01], [24C02], [24C04], [24C08] ou [24C16]
Le cycle est lancé : les leds rouge et verte s'éteignent ; la led jaune se met à clignoter.
Si tout se passe normalement, la led jaune va clignoter :
1 fois dans le cas d'une 24C01.
2 fois dans le cas d'une 24C02.
4 fois dans le cas d'une 24C04.
8 fois dans le cas d'une 24C08.
16 fois dans le cas d'une 24C16.
Puis la programmation s'achève et la led verte s'allume pour indiquer que tout est terminé, et qu'aucune erreur n'a été détectée (leds jaune et rouge éteintes).
Si un problème survient (mémoire absente, erreur d'écriture...), la programmation s'interrompt aussitôt, et la led rouge s'allume (leds jaune et verte éteintes).
Lorsque tout est terminé, que la programmation ait réussi ou non, il suffit d'appuyer sur la touche RESET (Remise à zéro) pour repasser en mode 'Attente' (clignotement rouge / vert) ; on peut alors lancer une autre programmation en appuyant sur l'une des cinq touches.
L'appui sur la touche RESET en cours de programmation abrège l'opération. La copie n'est alors que partielle, il faudra par conséquent relancer la duplication.
Bas de page (retour)
La programmation dure environ :
1 seconde dans le cas d'une 24C01,
2 secondes dans le cas d'une 24C02,
4 secondes dans le cas d'une 24C04,
8 secondes dans le cas d'une 24C08,
16 secondes dans le cas d'une 24C16.
Cette durée peut paraître longue, notamment à ceux qui utilisent le programmateur pour PC (sur port série ou parallèle) dont l'action est presque instantanée, mais l'algorithme a été renforcé de manière à détecter pour ainsi dire à coup sûr (presque) toute erreur ; la fiabilité est à ce prix...
L'interrupteur 'Mode', lorsqu'il est passant, permet d'éviter une phase de vérification et de réduire ainsi la durée de la programmation d'environ un tiers (ainsi, pour une 24C16, elle passe à environ 11 secondes). Mais il est dommage de limiter de la sorte la fiabilité du système, et je n'exclus pas d'attribuer à l'interrupteur une autre fonction, dans une version ultérieure du système.
cop10.hex
Código: Seleccionar todo
:020000001728BF
:020008000900ED
:04000C0043346F34D6
:100010007034693465347534723420346434653432
:100020002034323434344334783478340034831612
:10003000083085001F308600FF3081008312FF30BA
:10004000850086008D0197018320970A971D2B2834
:10005000061786122D280613861606091F399600E4
:100060009301940110301606031D382893154F286C
:1000700008301606031D3E2813154F2804301606B7
:10008000031D442893144F2802301606031D4A28E6
:1000900013144F2801301606031D242894178617C1
:1000A00006178616851D0D158F019001101F8613EA
:1000B000101B8617051E8028051D8028051C80281A
:1000C000142197200E0895000D1C80281621A320CE
:1000D0000D1C80280D19732897200D1C80281508E9
:1000E0000E06031D8028900A03198F0A14081006B3
:1000F000031D562813080F06031D56288612812853
:10010000061386178228193091008828FA3091004A
:10011000C830920000000000000000000000000055
:1001200000000000920B8A28910B88280800B2205A
:10013000BE200F0D0E39A138CF20F120E0208E0017
:100140000321C7200800B2200E08CF20F120C720CD
:100150000D1CB128BE20A030CF20F120C7200D1CDF
:10016000AA280800BE200F0D0E39A038CF20F1209C
:100170000D1CBD281008CF20F12008000A2105160B
:100180001821051218210F211821051608000F212A
:10019000051218210A2118210516182108009100BE
:1001A000083092000F21911F0512911B051618218E
:1001B0000A2118210F21910D920BD2280516080053
:1001C0000830920091010F21051618210A211821EB
:1001D000910D1110051A1114920BE3280F2111082B
:1001E000080005160F2118210A2118210D10051EDF
:1001F0000D140F2108000F21051218210A211821C2
:100200000F21051608000F21051618210A211821B3
:100210000F2108008D1C05158D18051408008D1C74
:1002200005118D18051008008D1008008D140800A8
:0402300000000800C2
:084000000200000000000000B6
:02400E00F13F80
:10420000280063002900200050006900650072004A
:1042100072006500200043004F004C002C0020007D
:104220006D00610072007300200032003000300029
:1042300031002C0020005600200031002E003000FC
:10424000530069007400650020007700650062007B
:104250003A00200068007400740070003A002F00DB
:104260002F007700770077002E0063006F006C004E
:1042700032003000300030002E006F007200670006
:00000001FF
Código: Seleccionar todo
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; ;;
;; Copieur autonome de memoires I2C ;;
;; 'cop10.ASM' : (c) Pierre COL, mars 2001. ;;
;; ;;
;; Programme du PIC16C84, 16F84 ou 16F84A avec quartz 4 MHz ;;
;; ;;
;; - v03 : 1ere modification avec RA4. ;;
;; - v04 : 2eme modification avec un SDA entierement commun sur RA4. ;;
;; - v05 : un seul jeu d'instructions + aiguillage avec bit CANAL. ;;
;; - v06 : copie la 24C16 'reference' vers la 24C16 'copie'. ;;
;; - v07 : + verification de la programmation. ;;
;; - v08 : + verification absence court circuit entrees a la masse. ;;
;; - v09 : clignotement led jaune pour patienter pendant programmation. ;;
;; - v10 : inversion des touches + suppression verif si inter passant. ;;
;; ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;**********************************************************************;
;;;; Definition et parametres (utiles a l'assembleur) : ;;;;
LIST P=16F84, R=DEC
#include "P16F84.INC"
__CONFIG _CP_OFF & _PWRTE_ON & _WDT_OFF & _XT_OSC
__IDLOCS 2000h
;**********************************************************************;
;;;; Etiquettes : ;;;;
;;; Adresses programme :
DEBUT equ 000h ; Debut de la memoire physique.
INT equ 004h ; Routine d'interruption (pas utilisee).
MEM equ 006h ; Endroit ou stocker des constantes.
;;; Adresses RAM :
DebutRAM equ 00Ch
BOOLEEN equ (DebutRAM+1) ; - 8 bits = 8 variables booleennes.
I2C_data equ (BOOLEEN+1) ; - Octet de donnee.
I2C_adrHIGH equ (I2C_data+1) ; - Adresse : octet de poids faible.
I2C_adrLOW equ (I2C_adrHIGH+1) ; - Adresse : octet de poids fort.
VAR1 equ (I2C_adrLOW+1) ; - 3 variables temporaires :
VAR2 equ (VAR1+1) ; sauvegarde de W, compteurs, etc.
MSBfin equ (VAR2+1) ;
LSBfin equ (MSBfin+1) ;
VerifDATA equ (LSBfin+1) ;
Touche equ (VerifDATA+1) ;
EtatLeds equ (Touche+1) ;
;;; Bits du Port A :
RA0 equ 0 ; SCL copie.
RA1 equ 1 ; non connectee.
RA2 equ 2 ; SCL reference.
RA3 equ 3 ; Inter "Mode".
RA4 equ 4 ; SDA commun copie et reference.
;;; Bits du Port B :
RB0 equ 0 ; Bouton poussoir pour copie 24C01.
RB1 equ 1 ; Bouton poussoir pour copie 24C02.
RB2 equ 2 ; Bouton poussoir pour copie 24C04.
RB3 equ 3 ; Bouton poussoir pour copie 24C08.
RB4 equ 4 ; Bouton poussoir pour copie 24C16.
RB5 equ 5 ; Led verte.
RB6 equ 6 ; Led rouge.
RB7 equ 7 ; Led jaune.
;;; Entrees / sorties :
SCLcop equ RA0
SCLref equ RA2
Inter equ RA3
SDA equ RA4
BP24C01 equ RB0
BP24C02 equ RB1
BP24C04 equ RB2
BP24C08 equ RB3
BP24C16 equ RB4
LedVerte equ RB5
LedRouge equ RB6
LedJaune equ RB7
;;; BOOLEEN :
I2CACK equ 0 ; verifie si l'acces au bus I2C est correct.
CANAL equ 1 ; 'Reference' : CANAL=0 / 'Copie' : CANAL=1.
NoVer equ 2 ; mis a 1 si inter passant : alors sauter verif.
;;; Constantes :
I2C_WR equ 00000000b
I2C_RD equ 00000001b
I2C_EEPROM equ 10100000b
;**************************************************************************;
;;;; Donnees EEPROM interne du PIC : ;;;;
EEPROM_DATA equ 2100h
ORG EEPROM_DATA ; Contenu de l'EEPROM (64 octets).
DE "(c) Pierre COL, mars 2001, V 1.0"
DE "Site web: http://www.col2000.org"
;**************************************************************************;
;; Divers actions, non utiles dans ce cas precis :
ORG DEBUT
GOTO PROG
ORG INT ; Retour d'interruption (mais
RETFIE ; celle-ci n'est pas utilisee).
ORG MEM ; Constantes ou textes divers a stocker :
Message DT "Copieur de 24Cxx",0
;; Debut du programme : ;;;;
PROG BSF STATUS,RP0 ; Pour acceder aux registres $80 a $AF.
; Configuration des ports A et B (0=S / 1=E) :
MOVLW 01000b ; - OUT : SCLref/SCLcop/SDA/RA1.
MOVWF TRISA & 01111111b ; - IN : RA3 = Inter.
MOVLW 00011111b ; - OUT : RB5 a RB7 (= Les 3 leds).
MOVWF TRISB & 01111111b ; - IN : RB0 a RB4 (poussoirs).
MOVLW 11111111b ; Registres d'options : B7=1,
MOVWF OPTION_REG & 01111111b ; resist. de tirage non actives.
BCF STATUS,RP0 ; Pour acceder aux registres $00 a $2F,
; notamment les Ports A et B.
MOVLW 11111111b
MOVWF PORTA ; Ports I2C initialises (a "1").
MOVWF PORTB ; Leds eteintes : [PB4]-[330]-(led)-[+5V].
CLRF BOOLEEN ; Initialiser d'un coup a '0' les
; 8 bits de la variable booleenne ;
; en fait, seul le bit 0 est utilise.
;************************* Partie principale : ************************;
;; Les trois leds sont eteintes. ;;
CLRF EtatLeds ;
AttendTouche CALL Tempo50ms ;
INCF EtatLeds,F ;
BTFSS EtatLeds,3 ; tous les 400 ms :
GOTO LedRONVOFF ; ou bien :
BSF PORTB,LedRouge ;;; Led rouge eteinte
BCF PORTB,LedVerte ;;; et led verte allumee.
GOTO LireClavier ; ou bien :
LedRONVOFF BCF PORTB,LedRouge ;;; Led rouge allumee
BSF PORTB,LedVerte ;;; et led verte eteinte.
LireClavier COMF PORTB,W ; Lire le clavier,
ANDLW 00011111b ; filtrer les 5 touches,
MOVWF Touche ; et stocker dans la variable 'Touche'.
CLRF MSBfin ; Initialiser a $00 les variables
CLRF LSBfin ; reprentant le depassement d'adresse.
TestBP24C16 MOVLW 00010000b ; Touche BP 24C16 (et seulement...) ?
XORWF Touche,W ;
BTFSS STATUS,Z ;
GOTO TestBP24C08 ; - si non : tester le BP 24C08.
BSF MSBfin,3 ; - si oui : Arret a l'adresse $800.
GOTO DebutCopie ; et on y va...
TestBP24C08 MOVLW 00001000b ; Touche BP 24C08 ?
XORWF Touche,W ;
BTFSS STATUS,Z ;
GOTO TestBP24C04 ; - si non : tester le BP 24C04.
BSF MSBfin,2 ; - si oui : Arret a l'adresse $400.
GOTO DebutCopie ; et on y va...
TestBP24C04 MOVLW 00000100b ; Touche BP 24C04 ?
XORWF Touche,W ;
BTFSS STATUS,Z ;
GOTO TestBP24C02 ; - si non : tester le BP 24C02.
BSF MSBfin,1 ; - si oui : Arret a l'adresse $200.
GOTO DebutCopie ; et on y va...
TestBP24C02 MOVLW 00000010b ; Touche BP 24C02 ?
XORWF Touche,W ;
BTFSS STATUS,Z ;
GOTO TestBP24C01 ; - si non : tester le BP 24C01.
BSF MSBfin,0 ; - si oui : Arret a l'adresse $100.
GOTO DebutCopie ; et on y va...
TestBP24C01 MOVLW 00000001b ; Touche BP 24C01 ?
XORWF Touche,W ;
BTFSS STATUS,Z ;
GOTO AttendTouche ; - si non : retourner lire la touche.
BSF LSBfin,7 ; - si oui : Arret a l'adresse $080.
;GOTO DebutCopie ; et on y va...
;; Eteindre les trois leds : ;;
DebutCopie BSF PORTB,LedJaune ; Led jaune...
BSF PORTB,LedRouge ; Led rouge...
BSF PORTB,LedVerte ; Led verte...
;; Tester l'etat de l'inter
BTFSS PORTA,Inter ; L'inter est-il passant (RA3=0) ?
BSF BOOLEEN,NoVer ; Si oui, bit NoVer de BOOLEEN a 1.
;; Lancer la copie : ;;
CLRF I2C_adrHIGH ; - La premiere adresse
CLRF I2C_adrLOW ; est l'adresse $000.
AdrSuivante1 BTFSS I2C_adrLOW,6 ; - toutes les 64 adresses,
BCF PORTB,LedJaune ; allumer ou eteindre la
BTFSC I2C_adrLOW,6 ; led jaune. Le clignotement
BSF PORTB,LedJaune ; fera patienter l'utilisateur.
BTFSS PORTA,SDA ; - On verifie que SDA est bien a 1,
GOTO ErreurCopie ;
BTFSS PORTA,SCLref ; - et que SCL reference est bien a 1,
GOTO ErreurCopie ;
BTFSS PORTA,SCLcop ; - et que SCL copie est bien a 1.
GOTO ErreurCopie ;
CALL CANALreference ; La memoire pointee est la reference.
CALL Read24C16 ; - On lit l'octet de donnee,
MOVF I2C_data,W ; - qu'on stocke pour comparaison
MOVWF VerifDATA ; ulterieure.
BTFSS BOOLEEN,I2CACK ; - Si erreur de lecture,
GOTO ErreurCopie ; on abrege...
CALL CANALcopie ; La memoire pointee est la copie.
CALL Write24C16 ; - On ecrit l'octet de connee.
BTFSS BOOLEEN,I2CACK ; - Si erreur d'ecriture,
GOTO ErreurCopie ; on abrege...
BTFSC BOOLEEN,NoVer ; Si l'inter est passant,
GOTO ApresVerif ; sauter la verification.
CALL Read24C16 ; - On relit l'octet ecrit.
BTFSS BOOLEEN,I2CACK ; - Si erreur de relecture,
GOTO ErreurCopie ; on abrege...
MOVF VerifDATA,W ; - On compare avec la donnee
XORWF I2C_data,W ; que l'on avait stockee.
BTFSS STATUS,Z ; - Si elle est differente,
GOTO ErreurCopie ; alors erreur : on abrege...
ApresVerif INCF I2C_adrLOW,F ; - On incremente l'adresse : d'abord
BTFSC STATUS,Z ; l'octet de poids faible, et si
INCF I2C_adrHIGH,F ; retenue, l'octet de poids fort.
MOVF LSBfin,W ; - Adresse courante = Adresse fin ?
XORWF I2C_adrLOW,W ; -> on compare les LSB...
BTFSS STATUS,Z ; - Si differents, adresse suivante.
GOTO AdrSuivante1 ;
MOVF MSBfin,W ; - Si egaux, on compare les MSB...
XORWF I2C_adrHIGH,W ; - si differents, adr. suivante.
BTFSS STATUS,Z ; - si egaux,
GOTO AdrSuivante1 ; alors termine avec succes :
BCF PORTB,LedVerte ; on allume la led verte et fin.
GOTO FinCopie ;
ErreurCopie BCF PORTB,LedRouge ; Erreur ? on a abrege ?
; allumer la led rouge, puis fin.
FinCopie BSF PORTB,LedJaune ; On eteint la led jaune.
Fin GOTO Fin ; Fin des operations...
; On reboucle eternellement,
;; Fin du programme. ; en attendant un RESET.
;************************* Routines du programme : ************************;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Temporisation de 0,05 seconde : ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Tempo50ms MOVLW 25
MOVWF VAR1
GOTO Boucle1TP
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Temporisation de 0,5 seconde : ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Tempo500ms MOVLW 250 ; N1 ; 1 **
MOVWF VAR1 ; 1 ** 4+
Boucle1TP MOVLW 200 ; N2 ; 1 * ;;
MOVWF VAR2 ; 1 * ;; 250x
Boucle2TP NOP ; 1 ; ;; (200x10+2+2)
NOP ; 1 ; ;;
NOP ; 1 ; 2+ ;;
NOP ; 1 ; 200x10 ;;
NOP ; 1 ; =2002 ;;
NOP ; 1 ; ;;
NOP ; 1 ; ;;
NOP ; 1 ; ;; T(us) = 4+N1x[N2x10+4].
DECFSZ VAR2,F ; 2 ; ;; avec N1=250 et N2=200 :
GOTO Boucle2TP ; ; ;; T = 501004 us
DECFSZ VAR1,F ; 2 ;; T = 0,5 s
GOTO Boucle1TP ; ;;
RETURN ; 2 **
;**************************************************************************;
;--------------------------------------------------------------------------;
; Fonctions principales pour ecrire et lire dans l'EEPROM ;
; I2C, octet par octet (pour les modeles 24C01 a 24C16). ;
;--------------------------------------------------------------------------;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Lit l'octet situe dans l'EEPROM I2C et met le contenu dans [I2C_data]. ;;
;; Pour indiquer l'adresse a lire : ;;
;; les 3 bits de poids fort de l'adresse sont mis dans [I2C_adrHIGH]. ;;
;; les 8 bits de poids faible de l'adresse sont mis dans [I2C_adrLOW]. ;;
;; (attention, cela modifie les variables VAR1, VAR2 et BOOLEEN) ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Read24C16 CALL Set_Adr_I2C ; - Pointer l'adresse.
CALL I2CSTART ; - Envoyer un ordre de
RLF I2C_adrHIGH,W ; lecture a l'EEPROM I2C.
ANDLW 00001110b ;
IORLW (I2C_EEPROM+I2C_RD) ; (octet : 1010xxx1b
CALL WtoI2C ; xxx = MSB adresse)
CALL I2CgetACK ; - Confirme par un ACK.
CALL I2CtoW ; - Lire l'octet.
MOVWF I2C_data ; - Le mettre dans [I2C_data]
CALL I2CsetNoACK ; - Terminer l'operation
CALL I2CSTOP ; (pas d'ACK, mais un STOP).
RETURN ; - C'est fini !
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Ecrit l'octet situe dans [I2C_data] dans l'EEPROM I2C. ;;
;; Pour indiquer l'adresse ou ecrire : ;;
;; les 3 bits de poids fort de l'adresse sont mis dans [I2C_adrHIGH]. ;;
;; les 8 bits de poids faible de l'adresse sont mis dans [I2C_adrLOW]. ;;
;; (attention, cela modifie les variables VAR1, VAR2 et BOOLEEN) ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Write24C16 CALL Set_Adr_I2C ; Pointer l'adresse
MOVF I2C_data,W ; Lire l'octet I2C_data a envoyer
CALL WtoI2C ; Envoyer l'octet
CALL I2CgetACK ; Acquerir l'ACK
CALL I2CSTOP ; STOP
BTFSS BOOLEEN,I2CACK ; Tester l'ACK :
GOTO MemNonDispo1 ; - Si PB : tant pis, abreger !
ProgPasFinie CALL I2CSTART ; - Sinon :
MOVLW (I2C_EEPROM+I2C_WR) ; attendre que la programmation
CALL WtoI2C ; soit terminee en essayant
CALL I2CgetACK ; d'acceder a la memoire.
CALL I2CSTOP ; Quand celle-ci repond (ACK),
BTFSS BOOLEEN,I2CACK ; c'est qu'elle est enfin dispo
GOTO ProgPasFinie ; et qu'elle a fini le boulot.
MemNonDispo1 RETURN ; La, c'est fini !
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Dans l'EEPROM I2C, pointe l'adresse memoire voulue : ;;
;; les 3 bits de poids fort de l'adresse sont mis dans [I2C_adrHIGH]. ;;
;; les 8 bits de poids faible de l'adresse sont mis dans [I2C_adrLOW]. ;;
;; ex pour l'adresse $5BC: $05 dans I2C_adrHIGH et $BC dans I2C_adrLOW ;;
;; (attention, cela modifie les variables VAR1, VAR2 et BOOLEEN) ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Set_Adr_I2C CALL I2CSTART ; - 'Start' : debut sequence.
RLF I2C_adrHIGH,W ; - on cree le premier octet :
ANDLW 00001110b ; B3 a B1 : les 3 bits de poids
IORLW (I2C_EEPROM+I2C_WR) ; fort de l'adresse ; B7 a B4 =
CALL WtoI2C ; [1010] et B0 = 0 (write).
CALL I2CgetACK ; - on verifie si l'octet a bien
BTFSS BOOLEEN,I2CACK ; ete recu :
GOTO MemNonDispo2 ; .si non, tant pis, on quitte.
MOVF I2C_adrLOW,W ; .si oui, on envoie l'octet de
CALL WtoI2C ; poids faible de l'adresse en
CALL I2CgetACK ; verifiant qu'il est recu.
MemNonDispo2 RETURN ;; Si PB : I2CACK=0 dans "BOOLEEN".
;**************************************************************************;
;--------------------------------------------------------------------------;
; sous-fonctions permettant de realiser ;
; les chronogrammes d'acces a la memoire : ;
;--------------------------------------------------------------------------;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Envoie une sequence 'START' au peripherique I2C ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
I2CSTART CALL SetSCL ; Au debut, SCL
BSF PORTA,SDA ; et SDA sont a '1'.
CALL Tempo5us ; On attend 5 us,
BCF PORTA,SDA ; puis SDA passe a '0',
CALL Tempo5us ; puis on attend 5 us,
CALL ClearSCL ; puis SCL passe a '0',
CALL Tempo5us ; puis on attend 5 us.
BSF PORTA,SDA ; SDA doit etre remis a '1'
RETURN ; pour pouvoir voir les donnees
; venant de la memoire.
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Envoie une sequence STOP au peripherique I2C ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
I2CSTOP CALL ClearSCL ; Au debut, SCL
BCF PORTA,SDA ; et SDA sont a '0'.
CALL Tempo5us ; On attend 5 us,
CALL SetSCL ; puis SCL passe a '1',
CALL Tempo5us ; puis on attend 5 us,
BSF PORTA,SDA ; puis SDA passe a '1',
CALL Tempo5us ; on attend 5 us...
RETURN ; Fin de la routine.
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Envoie un octet contenu dans W au peripherique I2C en 'serie' : ;;
;; (attention, cela modifie les variables VAR1 et VAR2) ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; L'octet a envoyer est mis dans VAR1 ; on va alors faire subir 8 fois
; a cet octet un decalage vers la gauche, en recopiant a chaque fois au
; prealable le bit B7 sur la broche SDA (avant d'appliquer une impulsion
; d'horloge sur SCL). La variable VAR2 sert de compteur : elle part de 8
; et est decrementee 8 fois jusqu'a 0 afin de compter le nombre de
; decalages :
WtoI2C MOVWF VAR1 ; - Octet a envoyer mis dans VAR1.
MOVLW 8 ; - 8 (nb de decalages) dans VAR2.
MOVWF VAR2 ;
NextBitI2Cout CALL ClearSCL ; - SCL mis a 0.
BTFSS VAR1,7 ; - Bit B7 de VAR1 a 1 ?
BCF PORTA,SDA ; si non : mettre SDA a 0.
BTFSC VAR1,7 ; - Bit B7 de VAR1 a 0 ?
BSF PORTA,SDA ; si non : mettre SDA a 1.
CALL Tempo5us ; - Appliquer impulsion sur SCL :
CALL SetSCL ; attente 5 us, SCL passe a 1,
CALL Tempo5us ; attente 5 us, SCL repasse a 0.
CALL ClearSCL ;
RLF VAR1,F ; - Decaler VAR1 un coup a gauche.
DECFSZ VAR2,F ; - Decrementer VAR2 ; si ce n'est
GOTO NextBitI2Cout ; pas la 8ieme fois, reboucler.
BSF PORTA,SDA ; - On remet SDA a '1' (permet
RETURN ; de lire SDA comme 1 entree).
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Lit un octet depuis le peripherique I2C et le met dans W : ;;
;; (attention, cela modifie les variables VAR1 et VAR2) ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; Cette routine ressemble beaucoup a la precedente ; mais au lieu
; de recopier le bit B7 sur SDA et de decaler l'octet vers la gauche
; et ce huit fois de suite, on commence par decaler l'octet, puis on
; recopie SDA sur B0, toujours huit fois de suite. Les bits ne sont
; plus retires un a un, mais au contraire empiles les uns apres les
; autres dans VAR1 :
I2CtoW MOVLW 8 ;- VAR2=8, variable compteur qui va
MOVWF VAR2 ; comptabiliser les 8 decalages.
CLRF VAR1 ;- VAR1 initialisee a 00000000b.
NextBitI2Cin CALL ClearSCL ;- SCL mis a 0.
BSF PORTA,SDA ;- SDA mis a 1 pour etre lisible.
CALL Tempo5us ;- attente de 5 us.
CALL SetSCL ;- SCL passe a '1'.
CALL Tempo5us ;- attente de 5 us.
RLF VAR1,F ;- decalage un coup vers la gauche.
BCF VAR1,0 ;- bit B0 initialise a 0.
BTFSC PORTA,SDA ;- on teste SDA : vaut-il 0 ?
BSF VAR1,0 ; si non (SDA=1), on met B0 a 1.
DECFSZ VAR2,F ;- huitieme cycle ?
GOTO NextBitI2Cin ; si non, reboucler cycle suivant.
CALL ClearSCL ;- apres dernier cycle : SCL a 0.
MOVF VAR1,W ;- L'octet lu VAR1 est copie dans W.
RETURN ; Fin de la routine
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Verifie si le peripherique I2C renvoie un 'Acknowledge' ; si celui-ci ;;
;; est present, le bit I2CACK est mis a '1', sinon il est mis a '0'. ;;
;; (la seule variable modifiee est 'BOOLEEN') ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
I2CgetACK BSF PORTA,SDA ; On s'assure que SDA est a 1.
CALL ClearSCL ; On genere l'impulsion positive
CALL Tempo5us ; sur SCL : SCL=0, attendre
CALL SetSCL ; 5 us, SCL a '1', attendre 5
CALL Tempo5us ; us. La, lire l'etat de SDA :
BCF BOOLEEN,I2CACK ; - On met le bit I2CACK a 0.
BTFSS PORTA,SDA ; - On verifie l'ACK : SDA=0 ?
BSF BOOLEEN,I2CACK ; oui ? OK, on met I2CACK a 1.
CALL ClearSCL ; Puis SCL repasse a '0'.
RETURN ; Et la routine est terminee...
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Envoie un bit 'Acknowledge' au peripherique I2C. ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
I2CsetACK CALL ClearSCL ; au debut, SCL est a 0.
BCF PORTA,SDA ; SDA est mis a 0 (on applique ACK).
CALL Tempo5us ; on attend 5 us.
CALL SetSCL ; Impulsion positive sur SCL :
CALL Tempo5us ; SCL passe a '1' pendant
CALL ClearSCL ; 5 us, puis repasse a '0'.
BSF PORTA,SDA ; Il faut penser a remettre SDA a 1.
RETURN ; Fin de la routine, retour au programme principal.
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Envoie un 'No Acknowledge' au peripherique I2C. ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
I2CsetNoACK CALL ClearSCL ; Au debut, SCL est a '0'.
BSF PORTA,SDA ; et SDAref a '1' (car pas d'ACK).
CALL Tempo5us ; on attend 5 us.
CALL SetSCL ; Impulsion positive sur SCL :
CALL Tempo5us ; SCL passe a '1' pendant
CALL ClearSCL ; 5 us, puis repasse a '0'.
RETURN ; Fin de la routine, retour au programme principal.
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Les deux routines suivantes mettent respectivement a ;;
;; '1' et a '0' la broche SCL ; le choix de la sortie SCL ;;
;; depend du canal actif : ;;
;; - Si le bit CANAL de BOOLEEN vaut 0 : SCL 'reference' active. ;;
;; - Si le bit CANAL de BOOLEEN vaut 1 : SCL 'copie' active. ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
SetSCL BTFSS BOOLEEN,CANAL ; Si bit CANAL = 0 :
BSF PORTA,SCLref ; SCLref est mis a '1'.
BTFSC BOOLEEN,CANAL ; Si bit CANAL = 1 :
BSF PORTA,SCLcop ; SCLcop est mis a '1'
RETURN
ClearSCL BTFSS BOOLEEN,CANAL ; Si bit CANAL = 0 :
BCF PORTA,SCLref ; SCLref est mis a '0'.
BTFSC BOOLEEN,CANAL ; Si bit CANAL = 1 :
BCF PORTA,SCLcop ; SCLcop est mis a '0'
RETURN
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Selection du canal (memoire) actif : ;;
;; - Si bit CANAL de BOOLEEN vaut 0 : SCL = SCLref (memoire 'reference'). ;;
;; - Si bit CANAL de BOOLEEN vaut 1 : SCL = SCLcop (memoire 'copie'). ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
CANALreference BCF BOOLEEN,CANAL ; bit mis a '0'.
RETURN
CANALcopie BSF BOOLEEN,CANAL ; bit mis a '1'.
RETURN
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; Temporisation de 5 micro-secondes pour respecter ;;
;; les temps d'acces aux peripheriques I2C. ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
Tempo5us NOP ; La tempo dure 5 us, avec le "CALL Tempo5us".
RETURN ; (CALL=2us) + (NOP=1us) + (RETURN=2us) = 5 us.
END ; L'assembleur peut maintenant aller faire dodo !
;********************** Fin generale du programme. ***************************;
P16F84.INC
Código: Seleccionar todo
NOLIST
; This header file defines configurations, registers, and other useful bits of
; information for the PIC16F84 microcontroller. These names are taken to match
; the data sheets as closely as possible.
; Note that the processor must be selected before this file is
; included. The processor may be selected the following ways:
; 1. Command line switch:
; C:\ MPASM MYFILE.ASM /PIC16F84
; 2. LIST directive in the source file
; LIST P=PIC16F84
; 3. Processor Type entry in the MPASM full-screen interface
;==========================================================================
;
; Revision History
;
;==========================================================================
;Rev: Date: Reason:
;2.00 07/24/96 Renamed to reflect the name change to PIC16F84.
;1.01 05/17/96 Corrected BADRAM map
;1.00 10/31/95 Initial Release
;==========================================================================
;
; Verify Processor
;
;==========================================================================
IFNDEF __16F84
MESSG "Processor-header file mismatch. Verify selected processor."
ENDIF
;==========================================================================
;
; Register Definitions
;
;==========================================================================
W EQU H'0000'
F EQU H'0001'
;----- Register Files------------------------------------------------------
INDF EQU H'0000'
TMR0 EQU H'0001'
PCL EQU H'0002'
STATUS EQU H'0003'
FSR EQU H'0004'
PORTA EQU H'0005'
PORTB EQU H'0006'
EEDATA EQU H'0008'
EEADR EQU H'0009'
PCLATH EQU H'000A'
INTCON EQU H'000B'
OPTION_REG EQU H'0081'
TRISA EQU H'0085'
TRISB EQU H'0086'
EECON1 EQU H'0088'
EECON2 EQU H'0089'
;----- STATUS Bits --------------------------------------------------------
IRP EQU H'0007'
RP1 EQU H'0006'
RP0 EQU H'0005'
NOT_TO EQU H'0004'
NOT_PD EQU H'0003'
Z EQU H'0002'
DC EQU H'0001'
C EQU H'0000'
;----- INTCON Bits --------------------------------------------------------
GIE EQU H'0007'
EEIE EQU H'0006'
T0IE EQU H'0005'
INTE EQU H'0004'
RBIE EQU H'0003'
T0IF EQU H'0002'
INTF EQU H'0001'
RBIF EQU H'0000'
;----- OPTION Bits --------------------------------------------------------
NOT_RBPU EQU H'0007'
INTEDG EQU H'0006'
T0CS EQU H'0005'
T0SE EQU H'0004'
PSA EQU H'0003'
PS2 EQU H'0002'
PS1 EQU H'0001'
PS0 EQU H'0000'
;----- EECON1 Bits --------------------------------------------------------
EEIF EQU H'0004'
WRERR EQU H'0003'
WREN EQU H'0002'
WR EQU H'0001'
RD EQU H'0000'
;==========================================================================
;
; RAM Definition
;
;==========================================================================
__MAXRAM H'CF'
__BADRAM H'07', H'50'-H'7F', H'87'
;==========================================================================
;
; Configuration Bits
;
;==========================================================================
_CP_ON EQU H'000F'
_CP_OFF EQU H'3FFF'
_PWRTE_ON EQU H'3FF7'
_PWRTE_OFF EQU H'3FFF'
_WDT_ON EQU H'3FFF'
_WDT_OFF EQU H'3FFB'
_LP_OSC EQU H'3FFC'
_XT_OSC EQU H'3FFD'
_HS_OSC EQU H'3FFE'
_RC_OSC EQU H'3FFF'
LIST
ASM.bat
Código: Seleccionar todo
@echo off
mpasm /q+ /P16F84 /e+ cop10.asm
